|
A comprehensive approach to training (conducting both virtual practical training and practical training with real unique equipment) helps to realize the gradual principle of training "from simple to difficult". The virtual part of the Internet Laboratory makes it possible to increase the number of users by attracting those who are only interested in mathematical simulation of robot behavior and do not need the remote control of real equipment. 
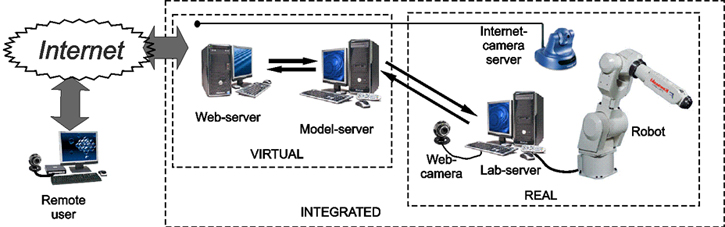
The virtual part of the Internet Laboratory comprises the Web-server and Model-server. The remote control interface is a Windows application which can be downloaded by a user from the Laboratory site after agreeing with the Internet Laboratory administration on the conditions of the remote experiment.
At the agreed time a remote user is connected via the Internet to the Laboratory Web-server where he is granted authorization. Then the server sends to the Model-server the sequence of control commands in accordance with the mission generated by the user.
Working with a virtual robot, the Model-server implements the commands set by the user for the robot simulation model, and feeds back the virtual robot state parameters with the frequency of about three times a second. These data received by the Web-server are then transmitted to the user interface via the Internet. The Web-server also determines the Model-server status, and after testing a current command either sends the next command of a mission, or finishes the remote control session.
Working with a real robot, the state parameters of the robot mathematical model are continuously transmitted from the Model-server to the Lab-server that controls the robot. The main task of the Lab-server is moving the Kawasaki robot tip in accordance with the coordinates and speeds of virtual robot end effector received from the Model-server, on condition of their feasibility. As we have to deal with highly sophisticated robotic equipment, the main requirement to the remote control system is protection from the scenarios that could damage electronic or mechanical robot systems. Therefore, provision is made for a multi-level system to check the feasibility of control commands at each stage of robot operation. Since the program system of the Lab-server has the widest possibilities of robot control, one of the main functions of the Lab-server is automatic cancellation of the remote user commands that could lead to breakage of expensive equipment.
The user remote control interface also provides connection to the Internet Camera Server which displays a video of the robot. A user can move the camera horizontally and vertically, zoom in and out to look at different parts of the robot. During the remote control session a user can communicate with the robot operator by means of a freeware program Skype installed on the remote user computer. Multi-media components installed on the Lab-server maintain a direct dulplex audio and video communication with the robot operator who monitors the user mission implementation.
|